Simulating a mechanical system using rpg_core.js
About this post
- Title
- Simulating a mechanical system using rpg_core.js
- Permalink
- https://ulysseszh.github.io/physics/2020/05/14/simulation-rpgmv.html
- Author
- UlyssesZhan <ulysseszhan@gmail.com>
- Date
- 2020-05-14T00:57:39+0800
- Categories
- physics
- Tags
- javascript, rgss, hamiltonian, calculus, ode, web, fourier transform
- Abstract
- Continuing my last work of simulating a mechanical system using RGSS3, I made a new version using rpg_core.js, the game scripting system shipped with RPG Maker MV. This version is live on web!
- Cover
-
 (prompts)
(prompts)
- License
- CC-BY-4.0
- View source
- View history
- Comment
Table of contents
This post is the continuation of the last post.
If you visit the page I have just created, you may find the simulation of a mechanical system.
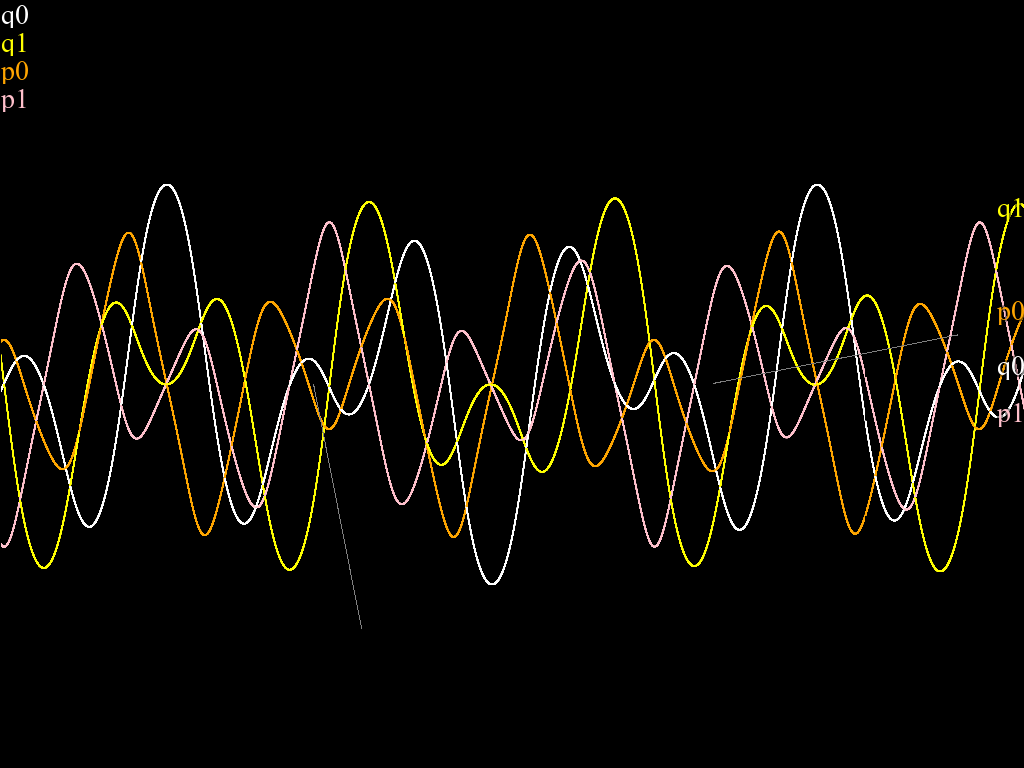
It is currently depicting two pendulum coupled with a spring (with and , and the original length of the spring is zero, and the two hanging points overlap),
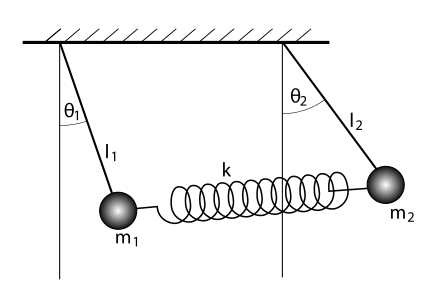
which is a classical example of non-linearly coupled system.
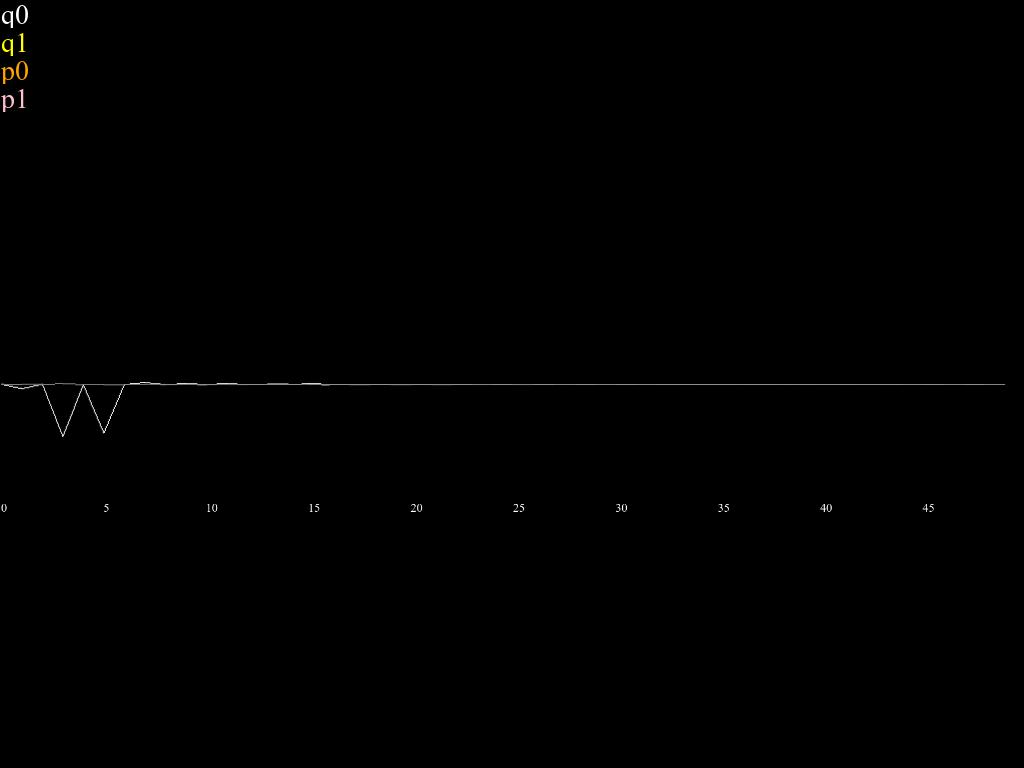
The pattern of the oscillation can be analyzed using discrete Fourier transformation, whose result can be found by clicking the buttons in the up-left corner (after the simulator has detected a period).
Hitting the space bar can make the simulation pause.
If you want to use it to simulate other mechanical systems, you can study the codes I wrote and write your own codes in the console.
By the way, the OpenRGSS version of the simulator is open-source here. Please star the repo if you like it.